这波科普解释了一下「为什么小鹏不采用激光雷达的方案」
从回答中,可以看出,激光雷达方案有两个显著的弊端:
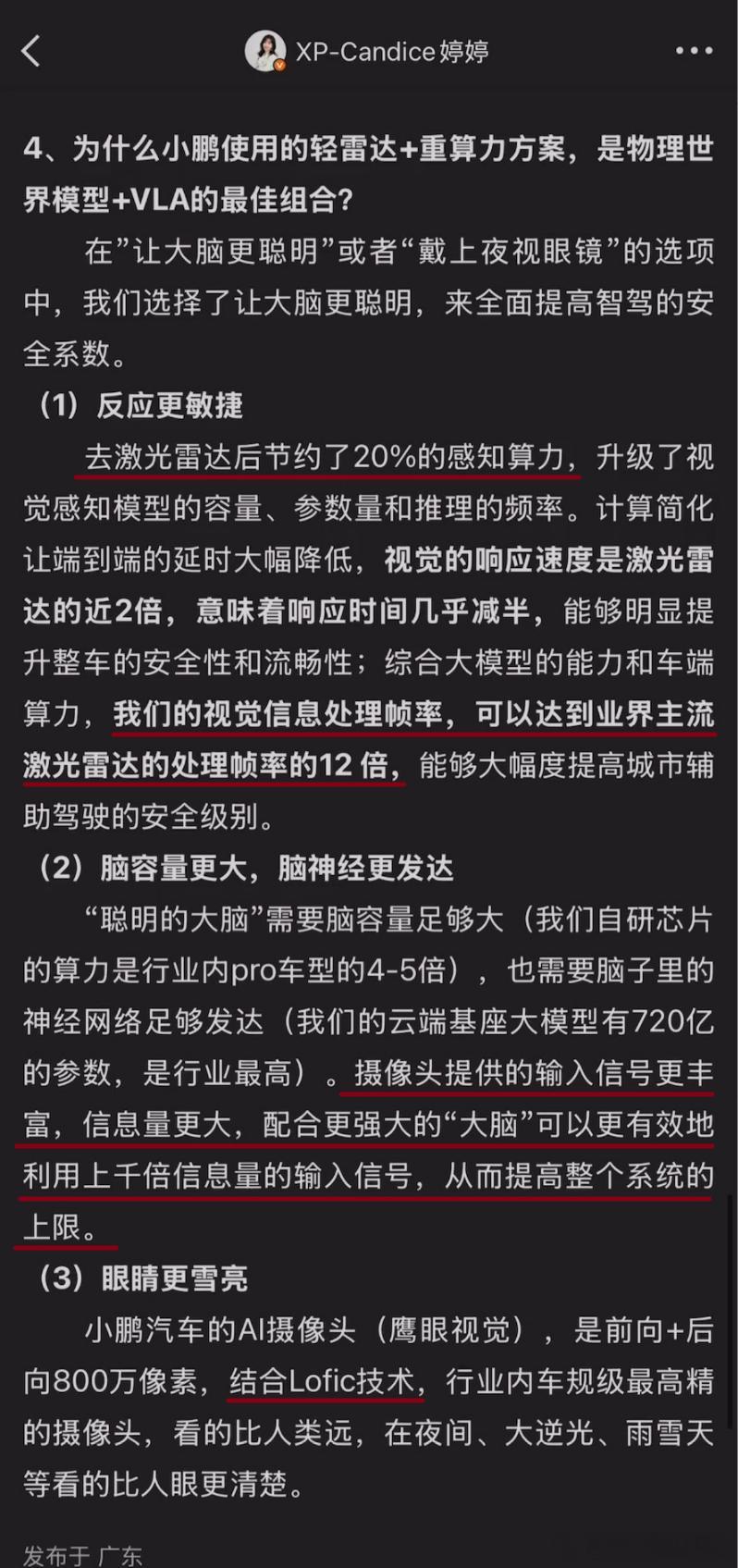
1️⃣吃算力/时间:激光雷达的感知算力需求比纯视觉高25%,而且响应时间几乎是纯视觉的2倍。
2️⃣信息丰富度不足:激光雷达擅长测距和几何轮廓检测,而物体的颜色、文字、动态行为等场景语义信息无法感知。
小鹏是通过「大算力」+「大模型」+「强算法」,来提升视觉方案的「响应速度」和「系统上限」
另外,针对「视觉感知在极端环境表现弱」的情况,也给出了针对性的解决方案:
采用了「Lofic技术」
这个技术在智能手机上也有应用,是在摄像头的像素旁放置一个高密度电容,可以收集过曝的光电子,可以大大增加图像的动态范围,强化在极端环境的表现。
新能源汽车小鹏汽车